Documentation
Manuel
Manuel d'utilisation : manuel-fr.pdf
Données exemples
Jeu de données pour tester PixScape : sample_project.zip
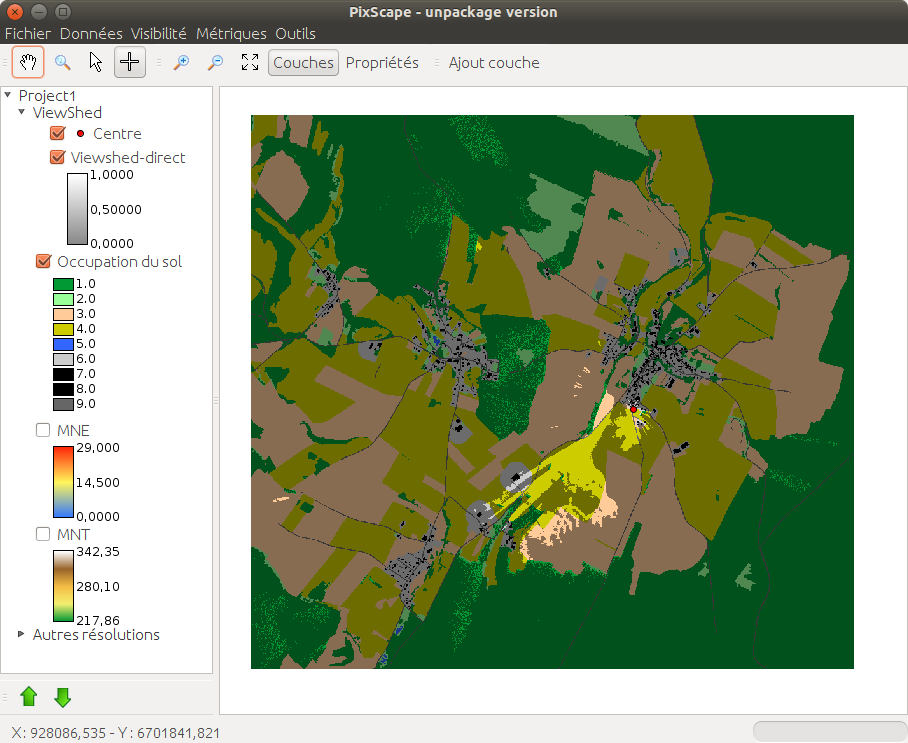
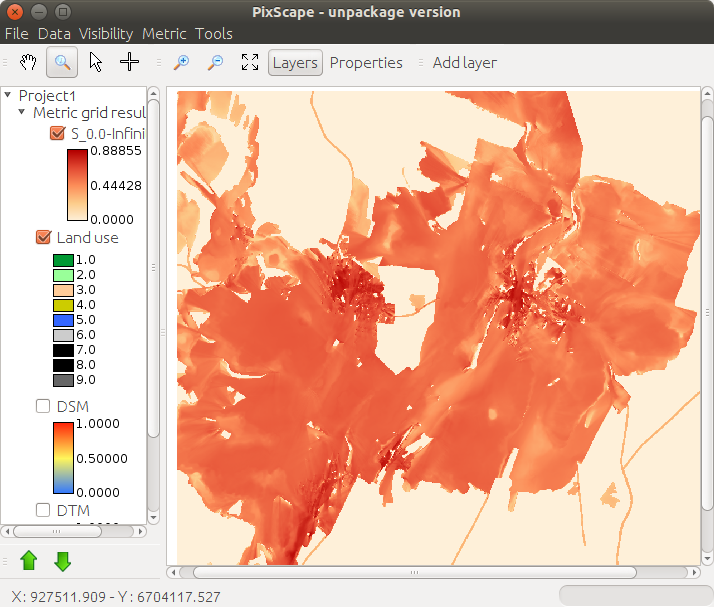
Le fichier zip contient un projet complet utilisable directement avec PixScape.
Code source
PixScape est distribué sous licence GPLv3. Le code source est téléchargeable depuis le dépôt Git de Sourcesup :
https://gitlab-mshe.univ-fcomte.fr/thema/pixscape
Références
Kerouanton C., Jolivet L., Perrin-Malterre C. & Loison A. 2024. Eye-catching or breath-catching: Role and landscape attributes of pauses differs among hikers’ profile when rambling in a French mountainous area. Journal of Outdoor Recreation and Tourism.46: 100734.
San Martin Saldias D. & McGlade J. 2023. A method for considering the evolution of the visible landscape. J Geogr Syst.25: 103–120.
Sahraoui Y., Clauzel C., Foltête J-C., 2021. A metrics-based approach for modeling covariation of visual and ecological landscape qualities, Ecological Indicators, 123, pp.107331.
Youssoufi S., Houot H., Vuidel G., Sophie Pujol S., Fred Mauny F., Foltete J-C., 2020. Combining visual and noise characteristics of a neighborhood environment to model residential satisfaction: an application using GIS-based metrics, Landscape and Urban Planning 103932.
Foltête J-C., Ingensand J., Blanc N., 2020. Coupling crowd-sourced imagery and visibility modelling to identify landscape preferences at the panorama level, Landscape and Urban Planning 103756.
Karasov O., Heremans S., Külvik M., Domnich A., Chervanyov I., 2020. On how crowdsourced data and landscape organisation metrics can facilitate the mapping of cultural ecosystem services: An Estonian case study, Land 9: 158.
Sahraoui Y., Vuidel G., Joly D, Foltête J-C., 2018. Integrated GIS software for computing landscape visibility metrics, Transactions in GIS, 22 (5), 1310-1323.
Hilal M., Joly D., Roy D., Vuidel G., 2018. Visual structure of landscapes seen from built environment, Urban Forestry & Urban Greening, 32, 71-80.
Sahraoui Y., Vuidel G., Foltête J-C., Joly D, 2016. PixScape – un outil logiciel intégré pour l’analyse du paysage visible, Cybergeo : European Journal of Geography, GeOpenMod - Modèles et logiciels, document 799.
Sahraoui Y., Youssoufi S., Foltête J-C., 2016. A comparison of in situ and GIS landscape metrics for residential satisfaction modeling, Applied Geography, 74, 199-210.
Sahraoui Y., Clauzel C., Foltête J-C., 2016. Spatial modelling of landscape aesthetic potential in urban-rural fringes, Journal of Environmental Management, 181, 623-636.